| 1. Aktivierung |
Mittels des Kontrollpadds wird der
Exocomp angewiesen, sich an einen bestimmten Ort zu begeben und ein bestimmtes Problem zu
lösen. Fallls das genaue Problem nicht bekannt ist, reicht es, den Zielort einzugeben. |
| 2. Begeben zum Zielort |
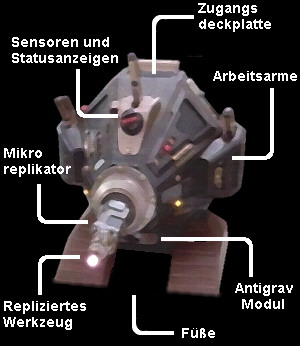
Je nach Zugänglichkeit
"läuft" der Exocomp mit seinen Füßen oder schwebt mittels des Antigrav-Moduls
zum Zielort. Dabei benutzt er die in seiner Datenbank gespeicherten Kenntnisse über die
räumliche Struktur, um ein möglichst schnelles Erreichen des Bestimmungesortes zu
gewährleisten. |
| 3. Problemdiagnose und Analyse |
Ist kein genaues Problem
spezifiert, kann der Exocomp nun anhand seiner Diagnosesensoren sowie des in seinem
positronischen Matrix gespeicherten Wissen und seiner Erfahrungen die beschädigten
Komponenten indentifizieren und das Problem erkennen und einschätzen. |
| 4. Reparatur |
Nachdem ein genaues Profil des
Schadens und ein Reparaturprotokoll erstellt wurde, beginnt der Exocomp mit der Reparatur
und stellt mit dem Mikroreplikator die benötigen Werkzeuge her. Die Diagnosesensoren und
der Zugriff auf das Wissen und die Erfahrungen bleiben auch während dieser Phase voll
aktiv, damit der Exocomp auf Veränderungen dynamisch reagieren kann und damit erst eine
vollständig autonome und erfolgreiche Reparatrur gewährleistet ist. |
| 5. Rückkehr zum Ausgangsort |
Nach erfolgreicher Beendigung der
Reparatur dematerialisiert der Exocomp das Werkzeug, setzt die Sensoren und das
Reparaturprotokoll zurück und kehrt zum Ausgangsort zurück. |
| 6. Datenarchivierung |
Zum Schluß zeichnet der
Exocomp die vollständige Lösung des Problems, die dabei gesammelten Erfahrungen und
alle weiteren Parameter für eine spätere Verwendungen bei einem gleichen oder ähnlichem
Reparaturauftrag. |